逆向運動學函式 <<
Previous Next >> W17
Python remote API 逆向運動學函式
W16_exam
影片:
主程式:
-- Put some initialization code here:
sim.setThreadSwitchTiming(2) -- Default timing for automatic thread switching
-- Here we execute the regular thread code:
res,err=xpcall(threadFunction,function(err) return debug.traceback(err) end)
if not res then
sim.addStatusbarMessage('Lua runtime error: '..err)
end
-- Put some clean-up code here:
simRemoteApi.start(19997)
吸盤程式:
function sysCall_init()
--this is teach by 40823214
objectHandle=sim.getObjectHandle('suctionPad')
sim.setUserParameter(objectHandle,'@enable','')
modelBase=sim.getObjectAssociatedWithScript(sim.handle_self)
robotBase=modelBase
while true do
robotBase=sim.getObjectParent(robotBase)
if robotBase==-1 then
robotName='Dobot'
break
end
robotName=sim.getObjectName(robotBase)
suffix,suffixlessName=sim.getNameSuffix(robotName)
if suffixlessName=='Dobot' then
break
end
end
s=sim.getObjectHandle('suctionPadSensor')
l=sim.getObjectHandle('suctionPadLoopClosureDummy1')
l2=sim.getObjectHandle('suctionPadLoopClosureDummy2')
b=sim.getObjectHandle('suctionPad')
suctionPadLink=sim.getObjectHandle('suctionPadLink')
local gripperBase=sim.getObjectAssociatedWithScript(sim.handle_self)
infiniteStrength=sim.getScriptSimulationParameter(sim.handle_self,'infiniteStrength')
maxPullForce=sim.getScriptSimulationParameter(sim.handle_self,'maxPullForce')
maxShearForce=sim.getScriptSimulationParameter(sim.handle_self,'maxShearForce')
maxPeelTorque=sim.getScriptSimulationParameter(sim.handle_self,'maxPeelTorque')
sim.setLinkDummy(l,-1)
sim.setObjectParent(l,b,true)
m=sim.getObjectMatrix(l2,-1)
sim.setObjectMatrix(l,-1,m)
end
function sysCall_cleanup()
--this is teach by 40823214
sim.setLinkDummy(l,-1)
sim.setObjectParent(l,b,true)
m=sim.getObjectMatrix(l2,-1)
sim.setObjectMatrix(l,-1,m)
end
function sysCall_sensing()
parent=sim.getObjectParent(l)
--this is teach by 40823214
local sig=sim.getIntegerSignal("pad_switch")
if (not sig) or (sig==0) then
if (parent~=b) then
sim.setLinkDummy(l,-1)
sim.setObjectParent(l,b,true)
m=sim.getObjectMatrix(l2,-1)
sim.setObjectMatrix(l,-1,m)
end
else
if (parent==b) then
index=0
while true do
shape=sim.getObjects(index,sim.object_shape_type)
if (shape==-1) then
break
end
local res,val=sim.getObjectInt32Parameter(shape,sim.shapeintparam_respondable)
if (shape~=b) and (val~=0) and (sim.checkProximitySensor(s,shape)==1) then
-- Ok, we found a respondable shape that was detected
-- We connect to that shape:
-- Make sure the two dummies are initially coincident:
sim.setObjectParent(l,b,true)
m=sim.getObjectMatrix(l2,-1)
sim.setObjectMatrix(l,-1,m)
-- Do the connection:
sim.setObjectParent(l,shape,true)
sim.setLinkDummy(l,l2)
break
end
index=index+1
end
else
-- Here we have an object attached
if (infiniteStrength==false) then
-- We might have to conditionally beak it apart!
result,force,torque=sim.readForceSensor(suctionPadLink) -- Here we read the median value out of 5 values (check the force sensor prop. dialog)
if (result>0) then
breakIt=false
if (force[3]>maxPullForce) then breakIt=true end
sf=math.sqrt(force[1]*force[1]+force[2]*force[2])
if (sf>maxShearForce) then breakIt=true end
if (torque[1]>maxPeelTorque) then breakIt=true end
if (torque[2]>maxPeelTorque) then breakIt=true end
if (breakIt) then
-- We break the link:
sim.setLinkDummy(l,-1)
sim.setObjectParent(l,b,true)
m=sim.getObjectMatrix(l2,-1)
sim.setObjectMatrix(l,-1,m)
end
end
end
end
end
end
MTB_robot remote API程式:
import sim as vrep
import math
import random
import time
import keyboard
print ('Start')
# Close eventual old connections
vrep.simxFinish(-1)
# Connect to V-REP remote server
clientID = vrep.simxStart('127.0.0.1', 19997, True, True, 5000, 5)
if clientID != -1:
print ('Connected to remote API server')
res = vrep.simxAddStatusbarMessage(
clientID, "40823129",
vrep.simx_opmode_oneshot)
if res not in (vrep.simx_return_ok, vrep.simx_return_novalue_flag):
print("Could not add a message to the status bar.")
opmode = vrep.simx_opmode_oneshot_wait
angle1=math.pi/180
# radian to degree
deg = 180/math.pi
# link 1 length
a1 = 0.468
# link 2 length
a2 = 0.4
# derivated based up https://www.youtube.com/watch?v=IKOGwoJ2HLk&t=311s
def ik(x, y):
# (x, y) need to be located inside the circle with radius a1+a2
if (x**2 + y**2) <= (a1+ a2)**2:
q2 = math.acos((x**2+y**2-a1**2-a2**2)/(2*a1*a2))
q1 = math.atan2(y, x) - math.atan2((a2*math.sin(q2)), (a1+a2*math.cos(q2)))
# The decimal point of number is rounded to the 4th place
return [round(q1*deg, 4), round(q2*deg, 4)]
else:
print("Over range!")
# end the script execution
theta = ik(0.2, 0.7)
print(theta[0], theta[1])
ret,axis2=vrep.simxGetObjectHandle(clientID,"MTB_axis2",opmode)
ret,axis1=vrep.simxGetObjectHandle(clientID,"MTB_axis1",opmode)
ret,axis4=vrep.simxGetObjectHandle(clientID,"MTB_axis4",opmode)
ret,suctionPad=vrep.simxGetObjectHandle(clientID,"suctionPad",opmode)
vrep.simxSetJointTargetPosition(clientID,axis1,theta[0]*angle1,opmode)
vrep.simxSetJointTargetPosition(clientID,axis2,theta[1]*angle1,opmode)
vrep.simxSetIntegerSignal(clientID,"pad_switch",1,opmode)
time.sleep(0.5)
while True:
vrep.simxSetJointPosition(clientID,axis4,-0.15,opmode)
time.sleep(0.5)
vrep.simxSetJointPosition(clientID,axis4,0.01,opmode)
theta = ik(0.2, 0.7)
time.sleep(0.5)
vrep.simxSetJointPosition(clientID,axis4,0.01,opmode)
vrep.simxSetJointPosition(clientID,axis2,theta[0]*angle1,opmode)
vrep.simxSetJointPosition(clientID,axis1,theta[1]*angle1,opmode)
time.sleep(2)
vrep.simxSetIntegerSignal(clientID,"pad_switch",0,opmode)
time.sleep(0.5)
vrep.simxSetJointPosition(clientID,axis4,-0.03,opmode)
time.sleep(0.5)
vrep.simxSetIntegerSignal(clientID,"pad_switch",1,opmode)
time.sleep(0.5)
vrep.simxSetJointPosition(clientID,axis4,0.03,opmode)
time.sleep(0.5)
theta = ik(-0.3, -0.55)
vrep.simxSetJointPosition(clientID,axis4,0.01,opmode)
vrep.simxSetJointPosition(clientID,axis2,theta[0]*angle1,opmode)
vrep.simxSetJointPosition(clientID,axis1,theta[1]*angle1,opmode)
time.sleep(2)
vrep.simxSetIntegerSignal(clientID,"pad_switch",0,opmode)
time.sleep(0.5)
vrep.simxSetJointPosition(clientID,axis4,0.01,opmode)
time.sleep(0.5)
vrep.simxSetJointPosition(clientID,axis4,-0.03,opmode)
time.sleep(0.5)
vrep.simxSetIntegerSignal(clientID,"pad_switch",1,opmode)
end
else:
print ('Failed connecting to remote API server')
print ('End')
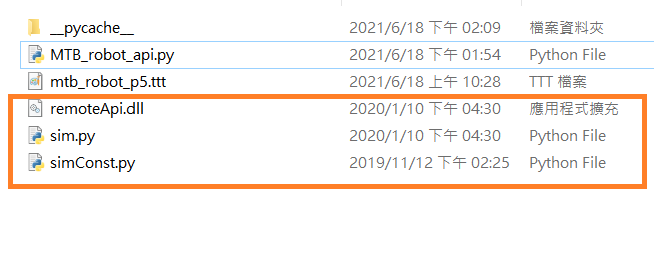
Tips:
需添加以下3個檔案並放在同一個資料夾
逆向運動學函式 <<
Previous Next >> W17